General Tips for Designing a PID Controller
- Obtain an open-loop response and determine what needs to be improved.
- Add a proportional control to improve the rise time.
- Add a derivative control to reduce the overshoot.
- Add an integral control to reduce the steady-state error.
- Adjust each of the gains , , and.
What is the output of PI controller?
The output of the P.I control is a power value and in order to convert it to a quantity that is comparable to that of the control signal, it goes through a power to PWM signal converter.
How do you calculate controller output?
The controller output is calculated by the rate of change of the deviation or error with time. The derivative or differential controller is never used alone. With sudden changes in the system the derivative controller will compensate the output fast. The long term effects the controller allow huge steady state errors.
What is the effect of PI controller on the system performance?
PI control is a form of feedback control. It provides a faster response time than I-only control due to the addition of the proportional action. PI control stops the system from fluctuating, and it is also able to return the system to its set point.
What is Kp and Ki?
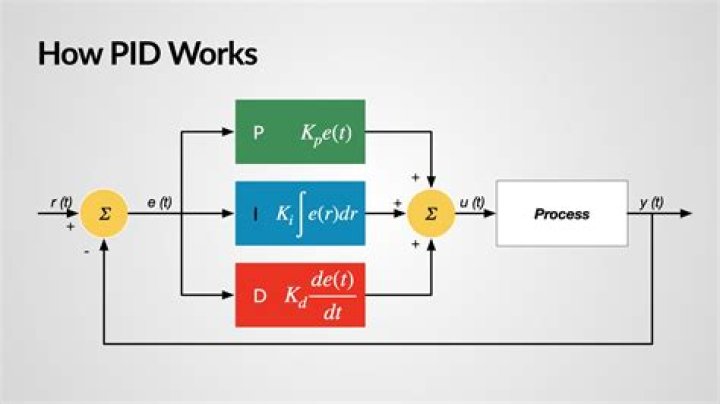
Kp is a proportional component, Ki is an integral component, and Kd is a derivative component. Kp is used to improve the transient response rise time and settling time of course. Ki works to improve steady-state response. Kd is used to improve the transient response by way of predicting error will occur in the future.
How does the Ziegler Nichols tuning method work?
A popular method for tuning P, PI, and PID controllers is the Ziegler–Nichols method. This method starts by zeroing the integral and differential gains and then raising the proportional gain until the system is unstable. The value of KP at the point of instability is called KMAX; the frequency of oscillation is f0.
How do you design a control system?
6 Steps to Designing a Flexible Control System with ISA-88
- Define Control and Operating philosophy.
- Understand the process before generating a design.
- Derive the Control Model.
- Use Good Segmentation methodology.
- Pay particular attention to exception handling.
- Build Test Model Prototype.
How do you calculate Kp and Ki?
Direct link to this answer
- Simply, the conversion is as follows(Let K denote gain and Ti denote time constant): Theme. K*(1+1/(Ti*s))
- is equal to. Theme. Kp+Ki/s.
- If you equate two expressions, then. Theme. Kp=K. Ki=K/Ti.
What is KV in control system?
These constants are the position constant (Kp), the velocity constant (Kv), and the acceleration constant (Ka). Knowing the value of these constants, as well as the system type, we can predict if our system is going to have a finite steady-state error.
What is PID KP?
In PID control method, there are three pieces of gain that work to correct or reduce the error, which consists of Kp, Ki and Kd. Kp is a proportional component, Ki is an integral component, and Kd is a derivative component. Kp is used to improve the transient response rise time and settling time of course.
What is the difference between I-only and PI-control?
One combination is the PI-control, which lacks the D-control of the PID system. PI control is a form of feedback control. It provides a faster response time than I-only control due to the addition of the proportional action. PI control stops the system from fluctuating, and it is also able to return the system to its set point.
What is proportional control in a PID controller?
PID controllers relate the error to the actuating signal either in a proportional (P), integral (I), or derivative (D) manner. PID controllers can also relate the error to the actuating signal using a combination of these controls. One type of action used in PID controllers is the proportional control.
How to calculate the step response of a continuous-time PID controller?
You should obtain the following step response. C = 1 Kp + Ki * — + Kd * s s with Kp = 350, Ki = 300, Kd = 50 Continuous-time PID controller in parallel form. Now, we have designed a closed-loop system with no overshoot, fast rise time, and no steady-state error.
What is the difference between bias and gain in PID controller?
The bias is simply the controller output when the error is zero. The controller gain is the change in the output of the controller per change in the input to the controller. In PID controllers, where signals are usually electronically transmitted, controller gain relates the change in output voltage to the change in input voltage.