The differential drive is a two-wheeled drive system with independent actuators for each wheel. Often, the non-driven wheel is a caster wheel, a small swiveled wheel used on office furniture: Unfortunately, castor wheels can cause problems if the robot reverses its direction.
What is a gearbox in a robot?
Robot gearboxes are part of the joints in robot arms. The joints ensure manoeuvrability while the gearboxes determine the speed and direction of movement. They are the link between the motor that supplies the drive energy and a machine component that has the task of executing a planned movement.
How does a robot gearbox work?
The principle of a robotic gearbox. The robotic transmission can switch to the next speed either automatically or semi-automatically. In the first case, the microprocessor unit receives signals from the sensors, on the basis of which the algorithm programmed by the manufacturer is triggered.
Which gears are used in robots?
- spur gears. The most common and simple gears are spur gears.
- Planetary Gears. Planetary gears or epicyclic gears consist of a ring gear, one or more outer gears (planet gears), revolving around a central gear (sun gear).
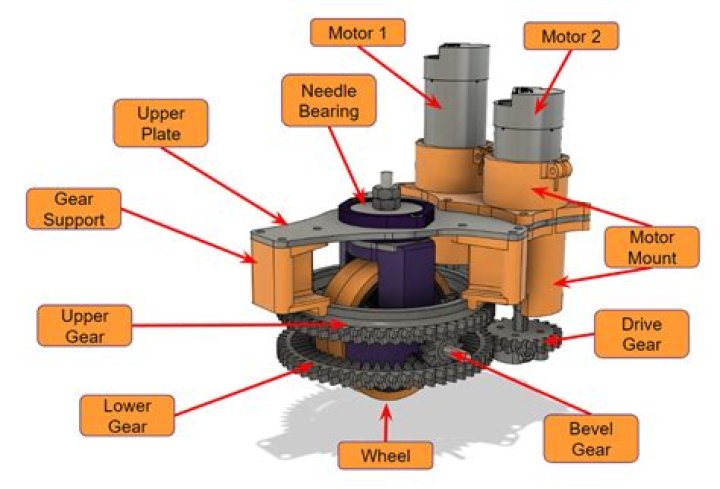
- Bevel Gears.
- Worm Gears.
- Lead Screws.
- Ball Screws.
- Idler gears.
- Compound Spur Gears.
What is differential driving?
The differential is a set of gears that transmits engine power to the wheels, while allowing them to turn at different speeds on turns. With rear-wheel-drive (RWD), the differential is between the rear wheels, connected to the transmission by a driveshaft.
What is Gearbox ratio?
The gear ratio in a transmission is the ratio between the rotational speeds of two meshing gears. The gear ratio is calculated by dividing the output speed by the input speed (i= Ws/ We) or by dividing the number of teeth of the driving gear by the number of teeth of the driven gear (i= Ze/ Zs).
What is a robotic transmission?
Transmission systems are used to transfer movement of the motor to a mobile articulation. This definition applies to robots whose structures are made up of articulated segments (rotational or translational), making up open chains from the base to the end effector (see Figure 6.1).
What is robotic manual transmission?
Automated manual transmission (AMT), also known as a clutchless manual, denotes a type of motor vehicle transmission that is closely based on the mechanical design and build of a conventional manual transmission, but uses automatic actuation to operate the clutch and/or the gear shift mechanism.
What is a robotic manual?
A manual robot is a type of manipulation robotic system that requires complete human intervention for its operation. Manual manipulators comprise a range of robotic systems, from basic to highly advanced, each having a specific control system according to its application.
Why motors are geared in a robot?
Brushed DC motors are ideally suited to robotics projects because they are small, powerful and easy to control at low voltages commonly provided by battery packs while still being highly efficient and reliable. A gearmotor is just a electric motor with a gearbox attached.
What is the difference between rack gear V2 and V2?
The Rack Gear v2 is wider and thereby more compatible with VEX High Strength gears. v2 has also eliminated the brass inserts from the original design, and replaced them with molded-in nut pockets. Now you can use 8-32 screws! This Advanced Gear Kit contains several gear types designed to help you build advanced mechanical systems.
What are the design oriented challenges of a 4 wheel robot?
For this topic we are specifically going to see some of the design oriented challenges that come in the way of designing a 4 wheel robot that uses Differential Steering for taking turns (left and right) or to make a Complete 360 Degree in-place (pivot) rotation (zero-radius turning).
What are the advantages of a 4 wheel drive robot?
Some of the advantages that you get is out of this design are :- No loss of torque, fast turning, no wheel slips while turning, better traction on wheels, cost saving by use of regular wheels. Decreasing the distance between the front and rear set of wheels, results in better zero-radius turning in any direction with 4 wheel drive robot.
How to steer a 4 wheel robot?
There are many approaches that can be followed for steering a 4 wheel robot, such as the famous car-type steering (Ackerman steering), Cab-Drive Steering, Omni Directional wheels and the Differential Steering method, where the speed of the wheels are altered to change the direction or to take turns.